Electronics, Test stand design
Electronics, Test stand design
ELECTRONICS - SOLENOID DRIVER: We burned out a power supply in our First Fire testing because there wasn't any back EMF suppression on the solenioid coils.
My thanks to Paul Breed for kindly suggesting this.
I wanted something that would integrate into the vehicle control system.
But first I had to think more on the control system itself; what components there'd be and how they'd communicate.
Then - what needed control?
Which led to a detailed static test stand schematic (see below).
Dumb boards controlled centrally need a lot of wires, so I wanted some intelligence locally.
PC's were too big, so I needed a micro processor.
My last work with microprocessors was with the Motorola M6800.
I got one of the original development kits when they first came out.
It got me my first job after I got out of the Navy (and a good wife as it turned out).
But that was almost 30 years ago.
So, which MPU?
There are a ton out there.
I decided on MicroChip's PIC; then had to learn it.
Went to make the prototype PCB and decided it was time to use the Altium 2004 we had gotten to replace Protel98 ... but never used.
Another learning curve, etc. etc.
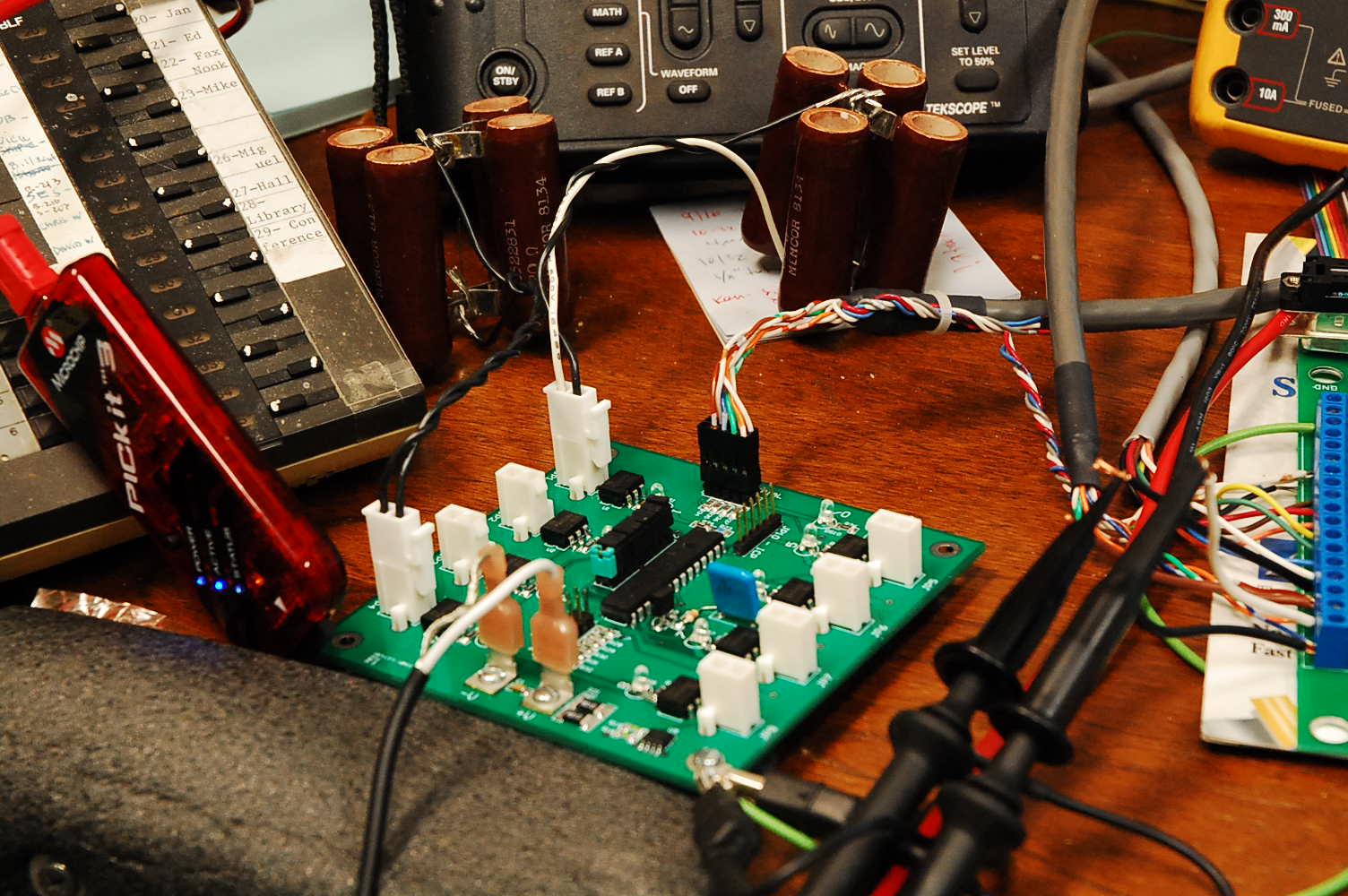
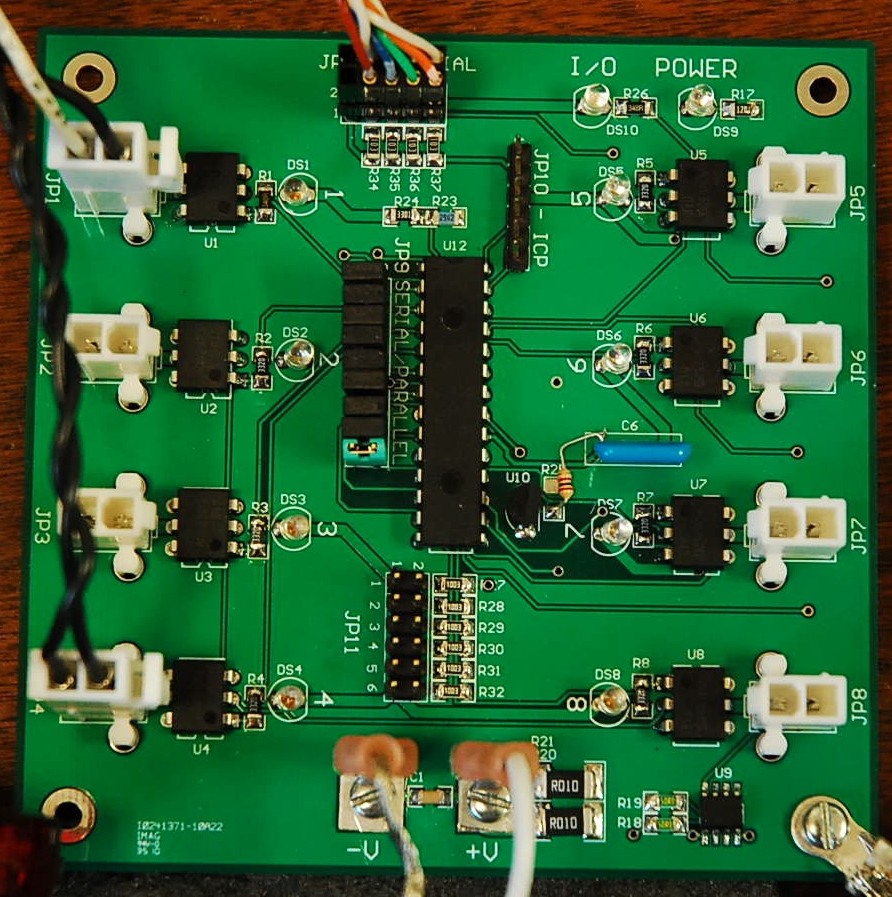
Eventually, I wound up with this:

SOLENOID DRIVER DESCRIPTION:
Board is 4"x4" and sources +V (5-30 vdc) to up to 8 loads.
They don't have to be solenoids. Anything up to 5 amps for any one output; 25 amp total for the board.
Back EMF protection for each output is provided by uni-directional 1500W TVS diodes SMCJ @ 33 volts.
Output connectors are Molex Mini Fit which will take up to 18ga wire, are 94V-0 and latching.
The outputs can be controlled directly by an optically isolated source of up to 5 volts of 3ma.
Or, the outputs can be controlled by serial interface (SPI) to a host controller.
The board also monitors (1000 Hz) total CURRENT draw (0-25 amps), +V voltage (3-30v), and temperature (-40C to +100C).
These can be read back over the SPI.
I've modified the SPI protocol somewhat to optionally allow CRC checking of commands from the host - don't want things turning on and off by accident.
Also to optionally allow a DEVICE SELECT byte with slave acknowledge to be used for multiple boards on the SPI bus.
The output drivers are Panasonic AVQ252G in 6 pin DIPs.
The MPU is a PIC18F25K22, 28 pin DIP.
These things are ridiculously cheap.
But had to roll my own PIC18F25K22.H file since MicroChip hadn't gotten around to it.
Wish I had gone with the 16 bit PIC MPU in the same 28 pin package though.
It has 12 bit ADC's and CRC in hardware.
The high side current monitor is a Silicon Labs SI8540.
Couldn't find any at the usual distributors (Avnet, Arrow, Newark, Digi-key, Mouser, Future, Allied) but SILABS was kind enough to send us some samples.
STATIC TEST STAND:
Along with the electronics work, we're working to fill in all the blanks on our static test stand.
One problem is finding affordable (for us) cryogenic flowmeters and pressure transducers.
Hoffer Flow and Kulite respectively have them, but they are in the $800 each, range.
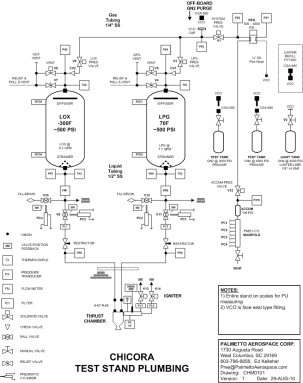
We'd like the Static Test Stand to be pretty much a rocket that doesn't fly.
We want to try out and use, where practical, flight type hardware and systems:
Tanks, valves, plumbing, transducers, controls, data collection, processing, video and telemetry etc.,
as close as we can get to an actual flight system so we can work out the kinks early on.
Next up is getting some LN2 (liquid nitrogen), learning practical cryogenics (keeping all our fingers and toes)
and trying out valves and connectors for LOX service.
OTHER WORK:
We've reprogrammed a router
(one we'd use on a vehicle) to record packets to a CF card.
This is for redundancy in case we lose our ground link and it also keeps us from having to route camera images through our flight computer.
For the the flight computer, we're working with a
Vortex86DX 1GHz SOC (System On Chip) type processor.
You can get this in the form of a big DIP to integrate with your own stuff, but for now we're using the boxed flavor, eBox 3300.
We're experimenting with the
VTI-SCC1300-D04 MEMS gyroscope which has some pretty
impressive specs regarding low drift and insensitivity to a rough mechanical environment, i.e., vibration, noise.
CONTACT US!
If you think the Solenoid Driver might help you out, let me know.
Might have some prototype pcb's left over.
I'd appreciate any comments about what we're doing.
Apologies for the funky response image below.
And more apologies! This email address was not enabled till 11-OCT-2010.
Sorry! But it works now!
Replace the -at- with the at sign.
Home